Человек сегодня управляет роботами либо дистанционно, отдавая
четкие команды посредством манипуляторов самого различного класса, либо
заранее создавая специальные алгоритмы, позволяющие автономным
аппаратам реагировать на визуальные «раздражители» (яркие флажки,
контрастные объекты и пр.). Проводятся также эксперименты по обучению
роботов реагировать на голосовые команды. Однако машинам будущего будут
предъявляться очень жесткие требования по коммуникативным возможностям.
В том числе необходимо и распознавание информации, которую человек
передает жестами.
Разумеется, создание робота, понимающего язык тела человека
(язык жестов) – очень сложная задача, однако определенных успехов
инженеры добиваются уже сегодня. В качестве яркого примера стоит
упомянуть последнее достижение сотрудников Университета Брауна (Brown
University) – команда исследователей продемонстрировала робота,
управление которым может осуществляться невербальными командами. Самое
главное, что для успешного управления аппаратом нет необходимости в
создании специальных условий: нахождение в помещении, определенном
освещении и пр.
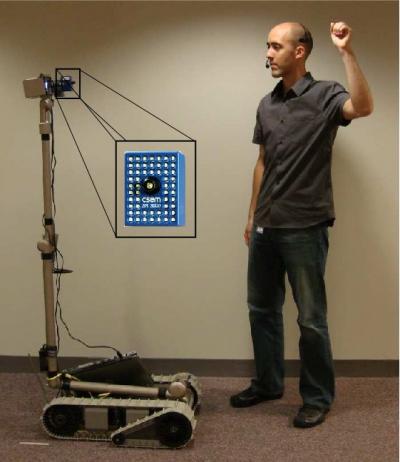
Оператор отдает команды роботу жестами
Как сообщают исследователи, им удалось сконструировать аппарат,
который будет двигаться за своим «хозяином» на некотором расстоянии,
даже если тот одет в обычную одежду (без специальных меток), находится
в естественной среде (отсутствуют контрастные объекты, которые
облегчают роботу задачу ориентации в пространстве). При этом нет
необходимости в постоянном контроле за траекторией движения робота – он
сам способен выбрать верный путь и огибать небольшие препятствия.
Но самое интересное, что аппарат способен реагировать на жесты.
С помощью понятных любому человеку указаний можно «попросить» робота
пройти сквозь дверной проем, остановиться, развернуться и вернуться в
первоначальную позицию. Демонстрация показала и такие возможности
аппарата, как поворот на 180 градусов, и прекращение своих действий,
если оператор исчезает из поля зрения робота.
Именно распознавание вербальных команд и жестикуляции –
основной акцент, сделанный исследователей при работе над проектом. А
вот начинать с нуля работы над аппаратной составляющей инженеры не
стали. За основу была выбрана платформа PackBot, которая используется и
в случае военных роботов, которую дополнительно оснастили камерой,
находящей в свободной продаже. Помимо этого, робот оснащен ноутбуком,
управляющим его движениями посредством специального программного
обеспечения, но уже созданного непосредственно самими разработчиками.
Исследователи в ходе своего проекта решили две основные задачи.
Первая – обучение робота распознаванию зрительных образов. В этом
случае программное обеспечение, обрабатывая изображение с камер,
акцентировало свое «внимание» на силуэте человека, а не специальных
метках. Вторая – использование специального «железа», способного
реагировать на инфракрасное излучение, что значительно облегчает задачу
распознавания объектов и определения расстояния до них.
|
 Главная
Главная